Inverse Kinematics of Robots | Robotics 101 Engineering Simplified 9:41 2 years ago 45 598 Скачать Далее
Robotics 2 U1 (Kinematics) S5 (Inverse Kinematics) P2 (Procedure and Programming) Angela Sodemann 26:19 6 years ago 106 722 Скачать Далее
How to setup IK bones in Blender: Easy Inverse Kinematics blendera 0:48 1 year ago 143 907 Скачать Далее
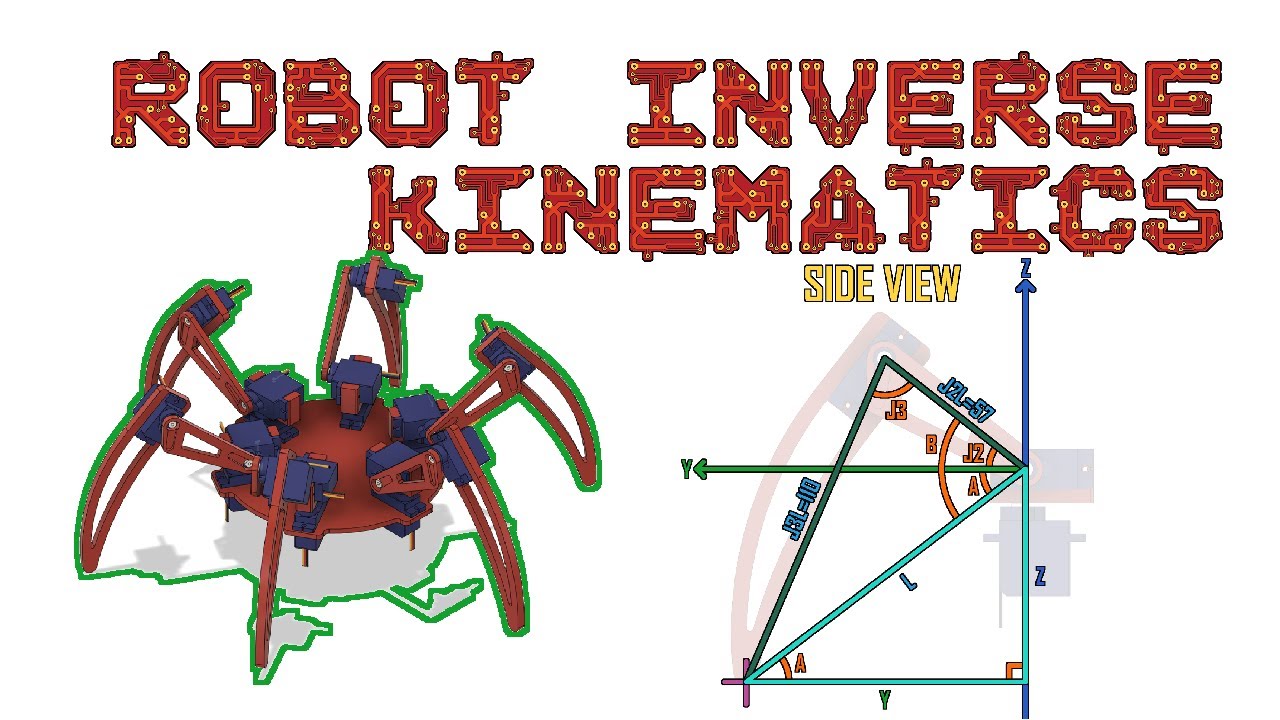
Robot Inverse Kinematics With A Hexapod Leg JustAnotherMakerChannel 14:24 1 year ago 62 875 Скачать Далее
Computing Inverse Kinematics using Numerical Methods | Robotic Systems Leopoldo Armesto 9:06 2 years ago 4 009 Скачать Далее
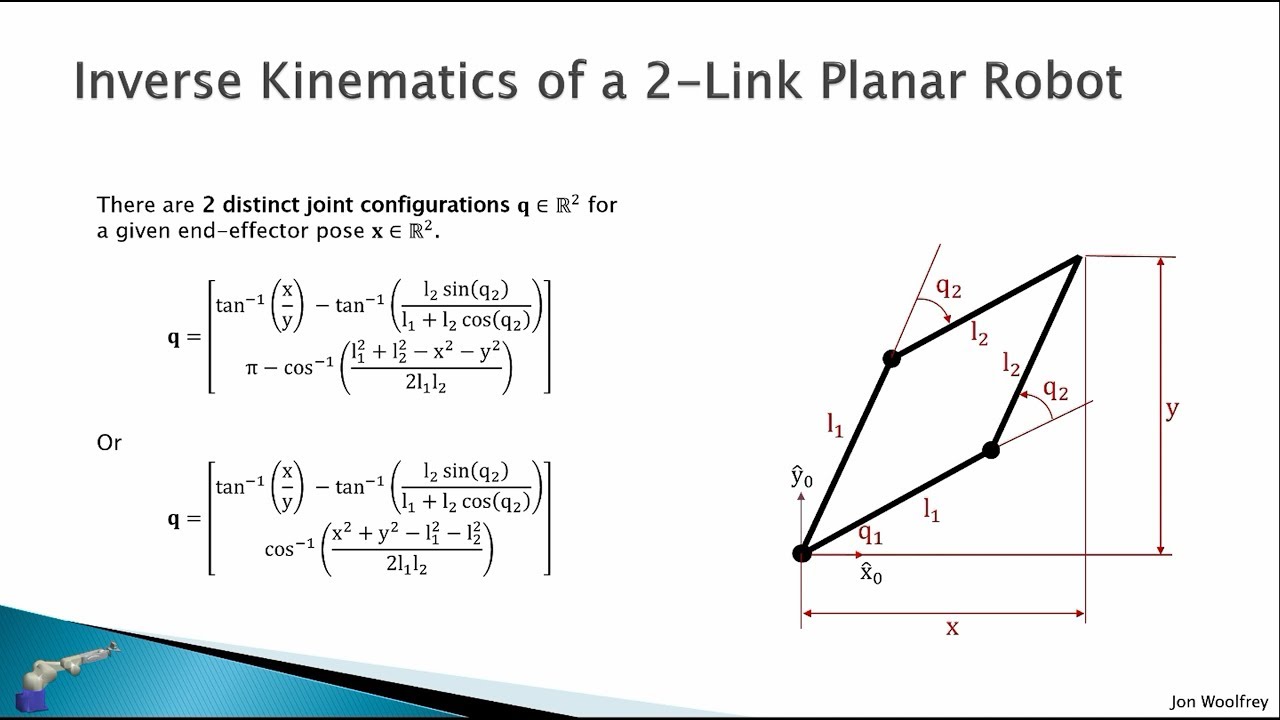
Robotics 1 U1 (Kinematics) S6 (Inverse Kinematics) P1 (Inverse Kinematics) Angela Sodemann 46:13 7 years ago 97 666 Скачать Далее